|
CONTENIDOS: Máquinas
|
||||||||||||||||||||
|
||||||||||||||||||||
|
1.1.- Las 5 grandes máquinas simples. |
||||||||||
|
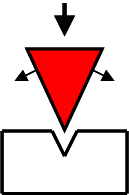
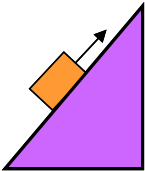
Los griegos denominaban “las cinco grandes” a las siguientes máquinas simples: la cuña, el plano inclinado, la palanca, la rueda y el tornillo.
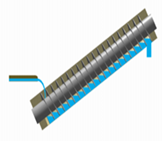
1.- Cuña. Es un plano inclinado doble. La fuerza que se aplica perpendicular a la base se transmite multiplicada en dos fuerzas perpendiculares a las caras de la cuña. Muchas herramientas tienen esta forma (formones, hachas, etc). 2.- Plano inclinado. Permite reducir el esfuerzo que sería necesario realizar para subir una carga desde un punto hasta otro de mayor elevación. A menor pendiente menor esfuerzo, pero mayor distancia a recorrer. 3.- Palanca. Es una máquina simple que con toda seguridad fue empleada por el ser humano desde el Paleolítico para realizar multitud de trabajos y tareas. 4.- Rueda. Máquina simple de la que no se sabe a ciencia cierta sus orígenes (posiblemente Mesopotamia hace 5500 años). Puede transformar el movimiento circular en lineal y constituye parte fundamental en otras máquinas más complejas. 5.- Tornillo. Es un plano inclinado, pero enrollado sobre una superficie cilíndrica. Es capaz de multiplicar el esfuerzo que se le aplica, por eso se introduce con relativa facilidad en los materiales. El tornillo de Arquímedes era un tornillo sinfín que permitía elevar agua desde una zona inferior hasta otra zona superior (imagen superior). |
|
2.- Las palancas. |
|||||||||
|
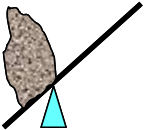
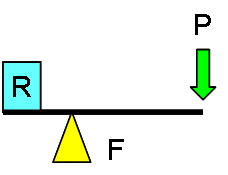
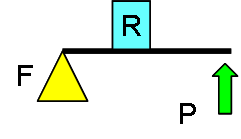
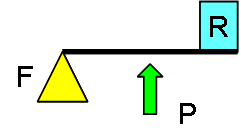
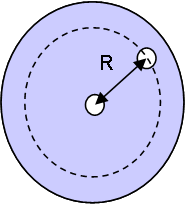
La palanca es un sistema mecánico capaz de vencer fuerzas y/o realizar desplazamientos. Es una o varias barras rígidas que oscilan sobre un punto de apoyo (fulcro F) por acción de dos fuerzas contrapuestas, la potencia (P) y la resistencia (R). Según la posición relativa del fulcro, potencia y resistencia, se distinguen tres tipos de palanca.
|
|
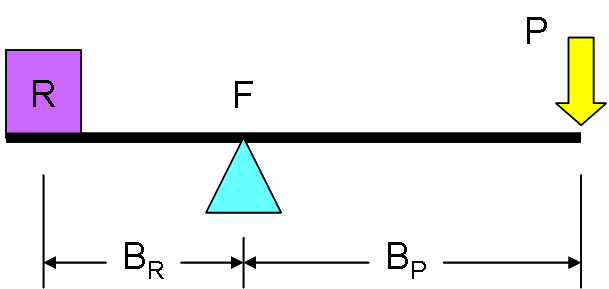
2.1.- Ecuación de equilibrio de las palancas. |
|||
Cualquier palanca (de primer, segundo o tercer género),
cumple la siguiente ecuación de equilibrio:
|
|
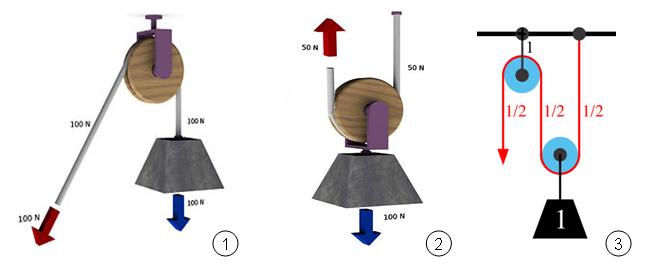
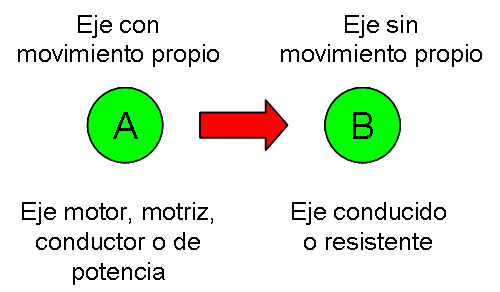
3.- Las poleas. |
|||
|
|
4.- Mecanismos de transmisión de movimiento. |
||||
|
||||
|
4.1.- Poleas de transmisión. |
||
|
|
|
4.3.- Tornillo sinfín-corona. |
||
|
|
4.4.- Ruedas dentadas y cadena. |
||
|
|
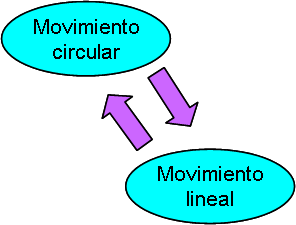
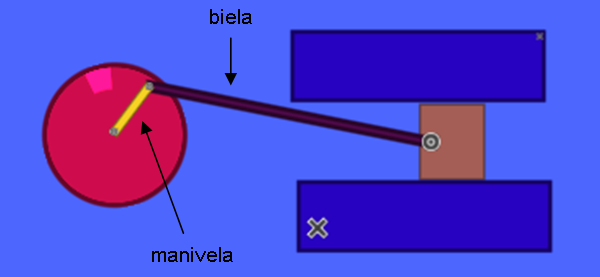
5.- Mecanismos de transformación de
movimiento. |
||
|
|
|
|
|
|
|
|
6.- Recursos
utilizados. |
|